Jos Richters is lid van HCC!3d en heeft een grote liefde voor modelspoorbanen. Die twee interesses komen mooi samen, zoals je kunt lezen in deze inleiding in het 3d-printen van zijn eigen treinen en spoorbaan.
Jos Richters
Tien jaar geleden bouwde ik mijn eerste 3d-printer. Daarmee printte ik onder andere modeltreintjes voor de kleinkinderen. In die tijd was de nauwkeurigheid van de geprinte modellen nog niet erg groot en ook over de schaal en zeker ook de detaillering maakte ik me toen nog niet zo druk. Met deze eerste modeltreinbaan gaf ik bij diverse gelegenheden demonstraties, onder andere om schoolkinderen te interesseren voor techniek.
Enige tijd geleden kreeg ik een zelfbouwlocomotief van UGEARS cadeau, een merk voor houten zelfbouwmodellen. Alvorens die locomotief in elkaar te zetten, heb ik de platen waaruit de onderdelen voor de locomotief met de laser voorgesneden zijn, onder de scanner gelegd en de scans in een tekenprogramma geïmporteerd. Vervolgens heb ik de onderdelen overgetrokken en naar 3d-volume opgetrokken. Zo maakte ik met de 3d-printer een plastic exemplaar op exact dezelfde schaal als het houten model. Dat was een behoorlijke klus, zie de afbeelding hierboven.
Later heb ik die locomotief nog verkleind naar H0-formaat (schaal 1:87), rechts op de afbeelding, wat qua werk nog een grotere klus was. Dat was ook het moment waarop ik de detaillering en de schaal meer ben gaan uitwerken. Natuurlijk speelt daarbij een rol dat mijn printervaring inmiddels is toegenomen en dat de tweede printer die ik inmiddels gebouwd heb, kwalitatief beter is.

SKETCHUP
SketchUp is het 3d-ontwerpprogramma dat ik sinds een jaar of vijftien voor de modelspoorbaan gebruik, het programma is al vaker in PC-Active besproken. In die tussentijd zijn er andere voor de hobbyist toegankelijke 3d-tekenprogramma’s bijgekomen zoals Fusion 360 en Onshape. Hoewel ik met deze laatste programma’s wel gespeeld heb, weerhoudt het lange leertraject mij ervan daar definitief op over te stappen. Het zou mij veel tijd kosten die ik liever gebruik om de spoorbaan verder uit te breiden en te perfectioneren. SketchUp heeft nadelen, maar andere programma’s hebben die ook. Een van de bekende nadelen van SketchUp is dat het niet waterdicht is. Dat klopt, maar in de praktijk valt dat mee om twee redenen: er is een plug-in beschikbaar die het model op waterdichtheid controleert, en een slicer zoals Cura van Ultimaker repareert het model veelal automatisch. Wel is het gebruik van plug-ins alleen mogelijk bij de geïnstalleerde versie SketchUp Make en de laatste versie daarvan dateert uit 2017. De gratis versie Sketch-Up Free is alleen online beschikbaar zonder de mogelijkheid plug-ins toe te passen. Maar met de versie uit 2017 kan ik voor mijn hobbydoeleinden nog prima vooruit.
PRINTTECHNIEK
Verderop In de tekst worden de FDM-printer (Fusion Deposit Manufacturing) en de SLA-printer (StereoLithographic Apparatus) genoemd. Beide zijn 3d-printtechnieken. Zonder daar al te diep op in te gaan, geef ik hier aan wat het verschil tussen die twee technieken is.
 |
 |
|
| FDM-printer | SLA-printer |
Bij de FDM-printer wordt een plastic draad gesmolten en het vloeibare plastic komt uit een klein gaatje van de nozzle in draadvorm (enigszins te vergelijken met een slagroomspuit, maar dan veel fijner) die stolt op een zogenaamd printbed. Door die draden naast elkaar respectievelijk in lagen boven elkaar te leggen, ontstaat er een vorm die dan, zeg maar, het werkstuk vormt.
Bij de SLA-printer heb je een bad met hars in vloeistofvorm en een lichtbron voor UV-licht. Daarmee wordt een figuur op het hars geprojecteerd, waardoor dit in de vorm van de figuur polymeriseert. Het polymeer hecht zich dan aan een printbed. Door iedere keer weer een beeld per laag op het hars te projecteren, hechten zich de nieuwe lagen aan de voorgaande lagen en zo wordt er een vorm uit het harsbad omhoog getrokken. Ook dat is dan weer het werkstuk. Omdat bij de SLA-printer met lichtvorm gewerkt wordt, is een veel grotere fijnheid te bereiken en dus een hogere resolutie. Dat is de reden waarom ik in de verdere beschrijving hier naar de SLA-printer verwijs.
 |
|
 |
DE SPOORBAAN
Hieronder bespreek ik de diverse onderdelen van de modelspoorbaan.
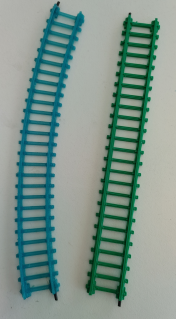
DE RAILS Het railprofiel heb ik getracht zoveel mogelijk overeenkomstig het H0-formaat te maken. Ook de bielzen en de railbouten zijn naar verhouding geprint. Ik heb verschillende pogingen moeten doen om de rail aan elkaar te koppelen. Uiteindelijk kwam ik uit op een pen-gatverbinding, waarbij ik als pen een stukje filament gebruik, dat in het gat van de andere rail past. Dat geeft een redelijke klemverbinding, maar voor de zekerheid gebruik ik ook nog een klem die over de laatste biels van de te koppelen rails gaat.
DE WISSEL
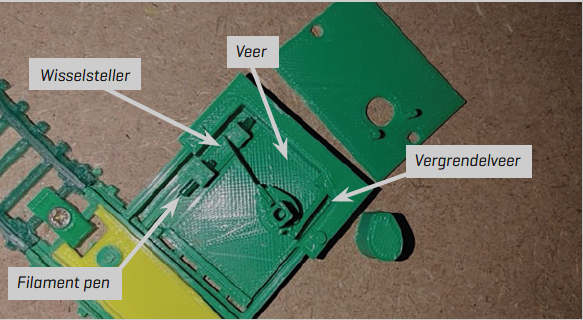
Eerst het rails-gedeelte van de wissel: om de spoorbaan wat meer te laten zijn dan een rondje om de kerk, is een wissel noodzakelijk, zodat de trein op meerdere trajecten kan rijden. Wat heb je nodig voor een wissel? Natuurlijk het railprofiel en de bielzen. Die zijn er al vanuit de rails. Dan een wisselstuk voorzien van wisseltongen en een kruising, het zogenaamde puntstuk dat de scheiding is tussen de recht doorgaande rail en de afslaande rail. Uiteraard komt daar nog de bediening van de wissel bij, de zogenaamde wisselsteller. Deze kan dan hand- of elektrisch 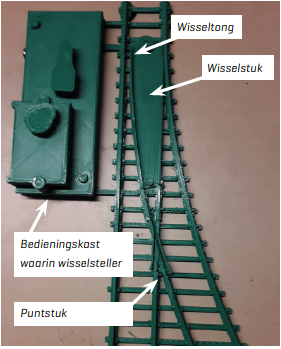 bediend zijn. Het wisselstuk zie je op de afbeelding hierboven, evenals het puntstuk. Het wisselstuk was niet moeilijk te maken, maar het puntstuk gaf wat hoofdbrekens. Hier komt het op zeer nauwkeurig printen aan, zodat het wiel van de trein niet in de lege ruimte van de kruising wegzakt of dat de wielflens tegen het railprofiel botst. Heel wat trial en error ging hieraan vooraf. Voor het puntstuk, dat ik als apart onderdeel printte, heb ik de flow in de slicer op 80 procent gezet om het materiaal zo min mogelijk te laten uitvloeien en daardoor zo nauwkeurig mogelijk bij de maat van de tekening te komen. Enige nabewerking was echter toch nog wel nodig.
bediend zijn. Het wisselstuk zie je op de afbeelding hierboven, evenals het puntstuk. Het wisselstuk was niet moeilijk te maken, maar het puntstuk gaf wat hoofdbrekens. Hier komt het op zeer nauwkeurig printen aan, zodat het wiel van de trein niet in de lege ruimte van de kruising wegzakt of dat de wielflens tegen het railprofiel botst. Heel wat trial en error ging hieraan vooraf. Voor het puntstuk, dat ik als apart onderdeel printte, heb ik de flow in de slicer op 80 procent gezet om het materiaal zo min mogelijk te laten uitvloeien en daardoor zo nauwkeurig mogelijk bij de maat van de tekening te komen. Enige nabewerking was echter toch nog wel nodig.
 |
| De bediening van de wissel |
HANDBEDIENING
Voor de bediening is de bedieningskast met wisselsteller aan de wissel bevestigd. Daarin zit de veerconstructie waarmee de wisselsteller en dus het wisselstuk heen en weer geschoven kan worden, zodanig dat het wisselstuk door de wielen terug gedrukt kan worden wanneer de trein langskomt, gaande van het puntstuk naar het wisselstuk én het wisselstuk niet in de juiste rijrichting staat. Deze veer wordt weer bediend door een knop met vergrendelfunctie zodat de knop in twee standen kan staan. De vergrendelfunctie wordt door een veer die in een gleuf in de knop valt, bewerkstelligd. Beide veren zijn geprint. Het blijkt dat het PLA materiaal voldoende veerkrachtig is om de veerfunctie uit te oefenen. De veerkracht kan bepaald worden door de dikte van de print in samenhang met de lengte van de veer. Hierbij is wel van belang dat in rusttoestand de veer onbelast is en daarmee blijvende vervorming voorkomen wordt. De hierboven beschreven terugdrukkracht voor het wisselstuk kan ook worden ingesteld door middel van twee pennen die de slagwijdte van de veer bepalen. Die pennen zijn een stukje filament die in de wisselsteller zijn ingeklemd, zodanig dat zij voor het instellen verder in- of uitgeschoven kunnen worden.
ELEKTRISCHE BEDIENING
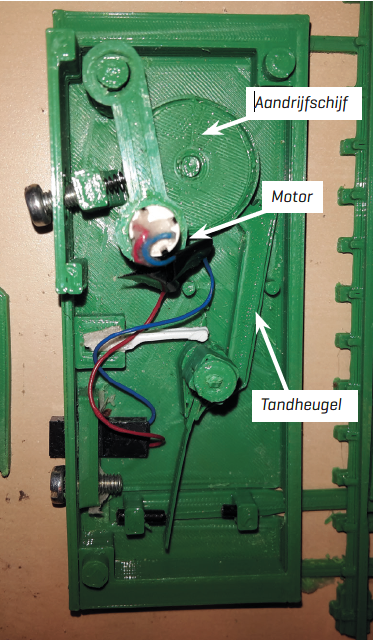
Voor de elektrische aansturing heb ik een verlengstuk aan de bedieningskast gemaakt voor de elektromotor en de tandheugeloverbrenging. Dat laatste lijkt een beetje op de tandheugel zoals die ook in een fietsbel zit. De tandheugel bedient de bovenbeschreven bedieningsknop, waardoor handbediening ook nog mogelijk is. De motor drijft de tandheugel aan via een tandwiel met daarboven een aandrijfschijf. De aandrijving is een micromotor met een hoog toerental, vandaar het tandwiel tussen motor en tandheugel om zodoende een vertraging te creëren. De motor wordt aangedreven door een kortstondige puls die door een Arduino Nano of Uno wordt afgegeven. De overbrengingen van de motor op het tandwiel vindt op dezelfde wijze plaats als beschreven bij de motor van de locomotief. Op het plaatje hiernaast is een en ander te zien.
DE LOCOMOTIEF
In de afbeeldingen hieronder zijn 2 SketchUp-aanzichten van de locomotiefmotor weergegeven, waarin een aantal delen is weggelaten om een indruk te geven van de motorconstructie. Enkele details beschrijf ik verder hieronder. In het begin heb ik een aantal locomotieven naar eigen ontwerp geprint. Maar als laatste printte ik een locomotief overeenkomstig het UGEARS-model dat ik hier al eerder noemde. Dat wil zeggen: het motorgedeelte, wat in het UGEARS-model een door elastiek aangedreven motor is, heb ik bij het H0-formaat vervangen door een aandrijving met elektromotor. Dat had tot gevolg dat de tandwielen, die nogal een prominente plaats in het UGEARS-model innemen, gewijzigd moesten worden.
 |
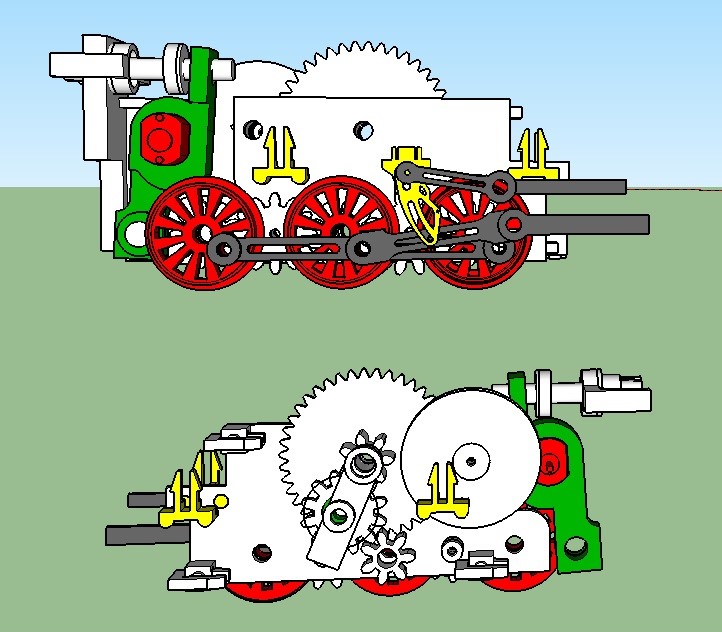 |
Dat wijzigen van de aandrijving en zijn tandwielen heeft nogal wat voeten in de aarde gehad. Ten eerste moesten de tandwielen verkleind worden. Ik heb gekozen voor tandwielen met een modulus van een 1/2. Dat betekent dat de verhouding van het aantal tanden tot de middellijn van het tandwiel is als 2 staat tot 1, oftewel: er zijn 2 keer zoveel tanden als millimeters voor de middellijn van de cirkel. Met de cirkel wordt hier de steekcirkel bedoeld. Dat is niet de omtrekcirkel van het tandwiel, een iets kleinere. Die steek cirkel moet ik weer gebruiken om de juiste afstand tussen de tandwielen te bepalen, zodat die op de juiste wijze in elkaar grijpen. Omdat de met een FDM-printer geprinte tandwielen toch niet op de honderdste mm nauwkeurig rond zijn, was het precies bepalen van de juiste afstand tussen de tandwielen een proefondervindelijk proces, maar uiteindelijk ben ik er toch in geslaagd om de motor en de tandwielkast redelijk soepel te laten draaien. Zo kan ik de locomotief met zijn aanhangwagens over het spoor laten rijden.
Nu ik kan beschikken over een SLA-printer, hoop ik te bereiken dat ik tandwielen met een modulus van 1/3 kan printen, waardoor een compactere bouwwijze van de motor mogelijk is.
De overbrenging van de draaibeweging van de elektromotor-as - de elektromotor is een Motraxx-micromotor die een zeer hoog toerental heeft - gaat via een wrijvingskoppeling, waarbij de motor-as onder veerdruk op een schijf met een rubberen O-ring drukt. Die schijf drijft vervolgens de tandwielen aan. Hierdoor heb ik een heel grote overbrengingsverhouding van een 1mm-asje naar een 15mm-schijf, oftewel 1 op 15.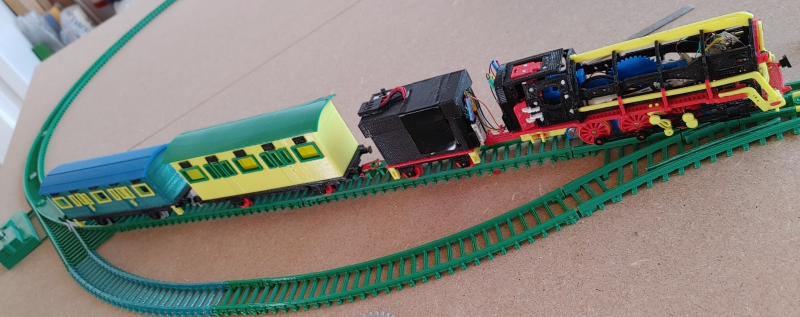
RIJTUIG
Achter een locomotief en tender behoren de wagons. Voor de spoorbaan op H0-formaat heb ik twee rijtuigen geprint, zie de afbeelding hieronder. Voor de rijtuigen zijn van belang het beslag - ramen, deuren en deurklinken, het ventilatierooster, wielveren, remblokken et cetera - en de koppeling, zodat de wagons automatisch kunnen koppelen. Voor het beslag ben je met de FDM-printer wat beperkt in de detaillering. Daarin probeer ik nu wat verder te komen met de SLA-printer met zijn hogere resolutie. 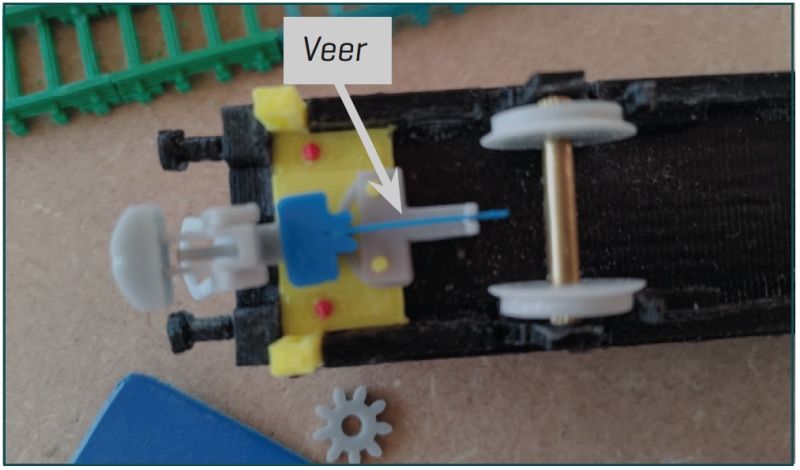
DE KOPPELING
De koppeling heb ik voor een groot deel gekopieerd van de bekende koppelingen op modeltreinen zoals bij Märklin. Hoewel het koppelingmodel en de uitvoering goed te kopiëren waren, bleek toch dat het geprinte PLA-materiaal wat andere eigenschappen heeft dan de metalen koppelingen, wat eigenlijk ook geldt voor het gehele project, maar voor de koppelingen in het bijzonder. Uiteindelijk ben ik na veel verschillende ervaringen toch op eenzelfde als hiervoor genoemde model gekomen, behalve de veerconstructie. De veerconstructie is nodig voor het rechtzetten van de koppeling bij het automatisch koppelen. De veer moet echter voldoende flexibiliteit hebben om in de bochten mee te buigen om te voorkomen dat het rijtuig uit de rails getrokken of gedrukt wordt. Deze veer maak ik zelf door een staafje te printen met een vierkant profiel van 0,3 mm. Door deze een bepaalde lengte te geven, krijgt het de gewenste veerkracht. Op het plaatje hierboven is deze te zien.
CARROSSERIE EN ONDERSTEL
De carrosserie en het onderstel van het rijtuig kunnen in diverse vormen gemaakt worden. Het beslag is voor het onderstel, met zijn wielveren, remblokjes en ander detaillering die onderaan het rijtuig zichtbaar zijn, van belang. Zoals gezegd probeer ik daar met de SLA-printer verder in te komen dan ik tot dusver met de FDM-printer kon. Voor de wielen is het van belang dat ze goed rond zijn. Om dat voor elkaar te krijgen, was nadraaien op draaibank noodzakelijk. De eerste proeven met de SLA-printer zijn zo goed dat nadraaien niet meer nodig is. De wielen op de afbeelding van het rijtuig zijn uit de SLA-printer. Wel moet je er rekening mee houden dat onderdelen gemaakt met hars van de SLA-printer brosser zijn dan onderdelen van PLA.
Voor de carrosserie is het beslag eveneens van belang. Met de FDM-printer heb ik de gehele carrosserie in één keer geprint, maar ramen, ventilatieroosters en dergelijke heb ik apart geprint en ze er met zoveel mogelijk klempassingen in gezet of erin gelijmd. Met de SLA-printer ben ik er nog niet helemaal uit of de carrosserie in één geheel of in onderdelen geprint moet worden, die ik dan vervolgens aan elkaar moet lijmen of klemmen. Bij het printen met de SLA-printer is het vinden van de juiste ondersteuning een andere opgave als je gewend bent aan een FDM-printer. Daar zal ik nog de nodige ervaring mee moeten opdoen en dit zal ook zijn invloed hebben op de manier van ontwerpen.
ELEKTRONICA VOOR DE AANSTURING
De elektronica voor de aansturing bevindt zich in de tender achter de locomotief. Daarvoor gebruik ik een Arduino Nano en om de trein via mijn telefoon te kunnen besturen, zit er een Bluetooth-module MH-10 in de tender. Met de Arduino kan ik de treinsnelheid variëren met behulp van PWM-aansturing voor de motor (Pulse Width Modulation). Om de motor van de locomotief in twee richtingen te kunnen laten draaien en daarmee de trein voor- en achteruit te laten rijden, koos ik voor een mini-relais met twee omschakelcontacten (DPDT). Dat relais zit in de locomotief. Uiteindelijk bleek dat de meest compacte bouwwijze. Het kostte me enige tijd om de juiste verbindingsdraden te vinden tussen de locomotief en de tender. De plastic geprinte trein is heel licht en de stugheid van de draden drukte de trein uit de rails.
De software voor de aansturing heb ik in Arduino IDE geschreven. Veel van de software-opbouw kun je met voorbeeldprogramma’s op internet vinden en kopiëren zonder dat je een kei bent in programmeren.
Uiteraard is er dan ook nog de scenery voor de modelspoorbaan. Het is de bedoeling om dat in de toekomst aan te pakken. Ik heb al wel wat huisjes geprint, maar helaas nog niet op het juiste H0-formaat.
